вЛЁЂИїзјБъЯЕЯТЕФЪжЖЏВйзї
ЂХ ДђПЊЕчдДЁЂЦјдД ЃЈзмЕчдДЁЂБфбЙЦїЯфЕчдДЁЂПижЦЦїЕчдДЁЂЛњЦїШЫЦјБУЃЉЁЃ
ЂЦ ЁОAЁП+ЁОдЫааЁП гвЩЯНЧ[RUN]ЕЦСС АДЁОднЭЃЁПЃЌ [RUN] -> [HOLD]ЕЦСС ЁЃ
ЂЧ ЁОAЁП+ЁОТэДяПЊЁП гвЩЯНЧ[MOTOR]ЕЦССЁЃ
ЂШ ЪжЖЏЫйЖШбЁдёЃКАДЁОЪжЖЏЫйЖШЁПбЁдё2Лђ3ЃЈЫйЖШ1-2-3-4-5-1бЛЗЧаЛЛЃЉЁЃ
ЂЩзјБъЯЕбЁдёЃК ЙиНкзјБъЃЈJOINTЃЉ/ЛљзјБъЃЈbaseЃЉ/ЙЄОпзјБъЃЈTOOLЃЉПЩбЛЗЧаЛЛЃЌЪзЯШбЁдёЙиНкзјБъЃЈврГЦИїжсзјБъЃЉЁЃ
ЂЪЮеИЫЮеЯТЃКЮеИЫЧсЮеЃЌЬ§ЕНЁАпЧЁБЩљЯьЃЌБэЪОЮеИЫГЩЙІЁЃ
ЂЫ ЛњЦїШЫвЦЖЏЃК АДЯТX-/X+ЁЂY-/Y+ ЁЂZ-/Z+ ЁЂ RX-/RX+ЁЂRY-/RY+ ЁЂRZ-/RZ+ ЃЌЛњЦїШЫНЋЗжБ№вЦЖЏИїИіжсЃЛ
ЂЬзјБъЯЕБфЛЛЮЊЛљзјБъЃЈbaseЃЉКЭЙЄОпзјБъЃЈTOOLЃЉЃЌдйЗжБ№жДааЩЯЪіЂЫЕФВйзїЃЌЭЌЪБМЧТМЯТИїдЫааЖЏзїзДЬЌЁЃ
ЖўЁЂШ§ЕуЮЛжУЪОНЬКЭдйЯж
ЂХ ПЊЛњЁЂЪОНЬзМБИЃЈВЮМћИїзјБъЯЕЯТЕФЪжЖЏВйзїЃЉ
ЂЦ ЁОAЁП+ЁОГЬађЁПЃЌЪфШыЮФМўУћЃЌШчЃК3151 ЁЃ
ЂЧ ЪОНЬвЛИіЕуЃЌАДЁОМЧТМЁПМќЃЌМЧТМЮЛжУ1 ЭЌРэдйМЧТМЮЛжУ2ЁЂЮЛжУ3 ЁЃ
ЂШ НЋЪОНЬПЊЙиДђЕНЁОREPEATЁП зЂЃКПижЦЦїКЭЪОНЬЦїЩЯОљвЊДђЕН[REPEAT]
ЂЩ дйЯжЁЃдЫаа ЁОAЁП+ЁОТэДђПЊЁПЃЌЁОAЁП+ЁОдЫзЊЁПЃЌЁОAЁП+ЁОбЛЗЦєЖЏЁПЃЈжИЪОЕЦХаЖЯЃЉЁЃ
ЂЪ дЫааФЃЪНбЁдё ВНжшСЌај/ВНжшЕЅВНЃЌдйЯжСЌај/дйЯжвЛДЮЁЃ
ЂЫ дйЯжНсЪј АДЁОднЭЃЁПЛђЁАНєМБЭЃжЙЁБАДХЅЛђПЊЙиДђЕНЪОНЬЁЃ
Ш§ЁЂдйЯжФЃЪНЯТЖЏзїУќСюЕФжДаа
ЛњЦїШЫПЩвджДааИїжжЕЅИіЕФЖЏзїЃЌИїжжУќСюдкШэМќХЬЪфШыЛУцЩЯЪфШыЃЌдкУќСюЧАМг"DOЁБУќСюБъЪЖЃЌАД[ENTER]ШэМќХЬЃЈВЮМћЯТЭМЃЉжДааЁЃЯТУцСаОйГЃМћЕФЖЏзїУќСюЃК
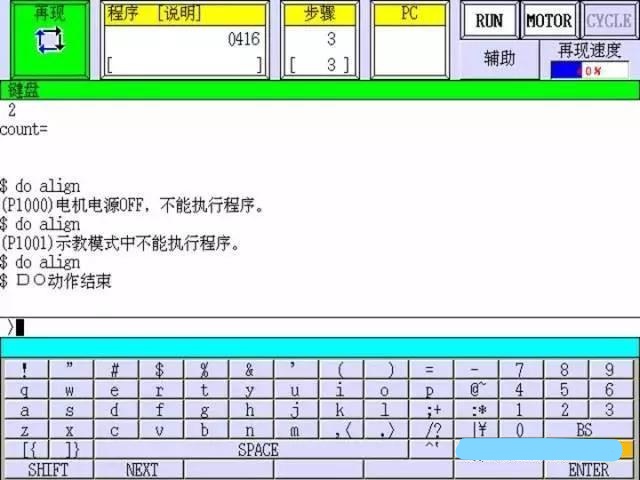
ЂйЖдЦыУќСю-ALIGN
ЂХДђЕНдйЯжФЃЪНЁЂТэДяПЊЁЂдЫзЊ
ЂЦЁОВЫЕЅЁП-[МќХЬ]
ЂЧ > DO ALIGN ЛиГЕ
ЂШ дйЛиЕНЪОНЬФЃЪНЃЌзМБИЯТвЛВНВйзї
ММЧЩЃКЪфШыУќСюРњЪЗМЧТМ[CTRL+L] МќЧаЛЛ
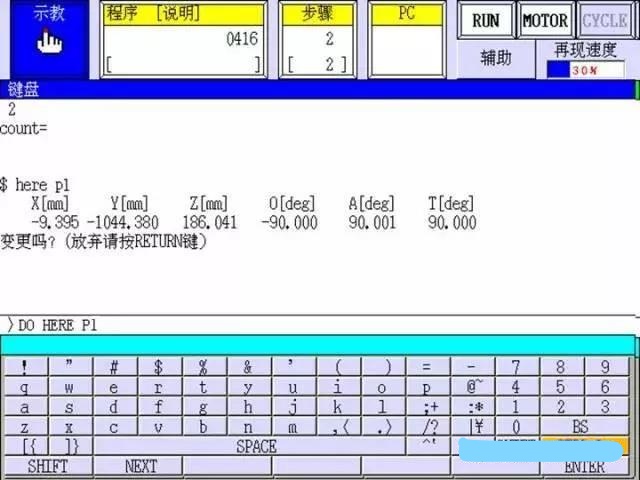
ЂкДцДЂЕБЧАЮЛжУЕНP1Еужа-HERE
ЂХДђПЊвЛИіЮФМў
ЂЦ ЁОВЫЕЅЁП-[МќХЬ]
ЂЧ > here p1 ЛиГЕЃЌЛсЯдЪОXЁЂYЁЂZЁЂOЁЂAЁЂTИїжсЕФзјБъЮЛжУжЕЃЌЬсЪОЃКБфИќТ№ЃПЃЈЗХЦњЧыАДRETURNМќЃЉ
дйЛиГЕЃЌМДБЃДцСЫЕБЧАЮЛжУЕНP1ЮЛжУжаЃЌдкГЬађжаОЭПЩвджБНгЪЙгУP1СЫЁЃ